- すべて
- 画像・動画
自動更新
並べ替え:新着順
ベストポスト
メニューを開く
自分のパソコンのROSのセットアップ、Jetsonのセットアップ、turtlebotのセットアップ、ずっとセットアップしかしてない。いきなりJetsonでROS触るよりturtlebotでROSに慣れてからやろうって話だったのに、ずっとセットアップで躓いてなんもおもんない。ROS にずっと触れてない。
メニューを開く

Jetson orin nano 8GBにOSとROS1が入り、GazeboとRvizが起動していますので、AIロボティクス学習が進みそうです。 右側のコンパクトPCケースにJetson orin nano 8GBを収めています。 pic.twitter.com/SOQwXSkf4B
メニューを開く
Jetson Nano AIロボットキット と Rplidar A1 レーダーROSスマトタンク車DIYロボットアームキット SLAM マップの作成、自律ナビゲーション、7インチのタッチスクリーン付き amzn.to/3SwtOUo #タイムセール
メニューを開く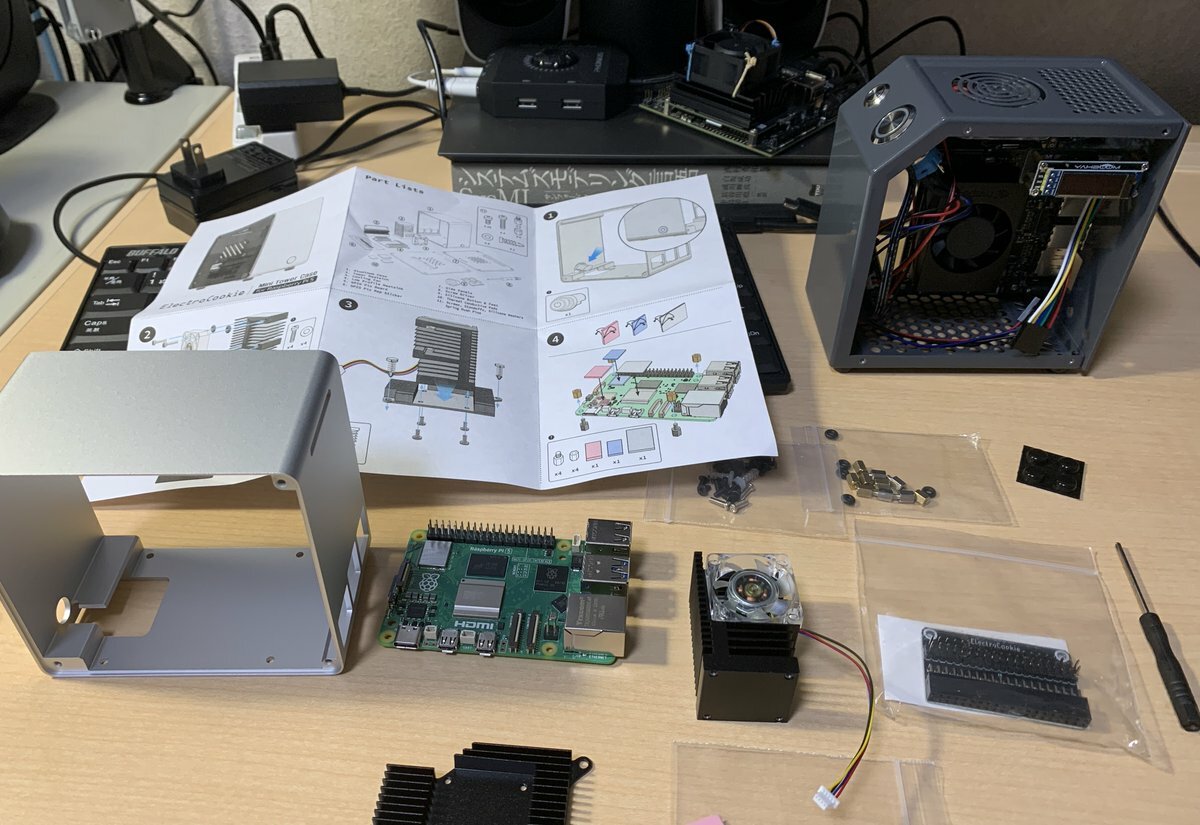
「とてもゆっくりしたロボット開発」今日の工作は、ラズベリーパイ5基盤を専用ファン付きケースに収める作業です。 それとJetson nanoは基盤剝き出しの状態に戻しました。新たにJetson orin nanoを専用ケースに入れたので、専用OSをSSDにインストールしたらROS2専用にしたいと思います。 pic.twitter.com/6z6XEIfM52
メニューを開く
Jetson Nano AIロボットキット と Rplidar A1 レーダーROSスマトタンク車DIYロボットアームキット SLAM マップの作成、自律ナビゲーション、7インチのタッチスクリーン付き amzn.to/3SwtOUo #タイムセール祭り
メニューを開く
とてもゆっくりしたロボット開発過程としての今日は、 Jetson nano 上のROS1でのタートルシムでノード、トピック、メッセージの流れを見ました。 pic.twitter.com/WV7FVk2g6C
メニューを開く
NVIDIA Isaac Perceptor はオープンソースisaac ROS上に構築されたワークフローである。 NVIDIAは開発を無料で支援し、自社のプラットフォームと最も親和性の高い自社GPUである「jetson」を売りたいって事なのかな。 まだ不明なのはkudanはどこで利益を得るのか?オンボードと上位互換の関係的な?
人気ポスト
長女が産まれた時にお祝いにもらった離乳食用のマッシャー、普通の調理でも重宝してずっと使っていたのですが、本日ゆで卵を潰した時にボキっとやってしまった。19年ありがとうな!!
着てると高確率で「どこの?」って聞かれるシャツ。一癖あるぽこぽこ生地、溶けるような肌触り、計算し尽くされたシルエット…これが4000円台なのやばい
義母が新紙幣でとんでもない神引きしてる これ確率ヤバそう
左 欲しかったやつ 右 親が買ってきたやつ
一万円の価値が半額になってるのかと思うくらいのクオリティ #新紙幣
銅のブレスレット今日届きました。付けた瞬間から左手示指から環指までの痺れが半分以下に!なんだこれ!時間が経つに連れ更に痺れが弱くなった。なんだこれ🤗
友達のノートまじかっけー
「オレンジジュースとリンゴジュースを凍らせたやつで白ワインを飲めば実質サングリアになるのでは?」と思ってやってみました。最強です。美味いしキンッキンに冷えるし氷が溶けるほどむしろ濃くなる。
買い物して出たら隣の15が見事なまでに 普段の足!乗りっぱなし!希少価値とか知らん! っていう具合でこのご時世ある意味新鮮だったので思わず撮ってしまった
テレビでYouTubeなんか見るもんじゃないな