- すべて
- 画像・動画
自動更新
並べ替え:新着順
ベストポスト
メニューを開く

HDD外す必要はなかったです😇 インストール用のisoファイル書き込んだUSBメモリ作ってNUCにさして起動したらいけました! VMwareにインストールした時あれほど苦労したネット接続も何の問題もなく秒で解決しました😄 #Ubuntu #ROS2 pic.twitter.com/0iJXAyCyg3
メニューを開く
NUCのケース開けたらSSDかと思ってたけどHDDだった😅 まあとりあえず動けばよしなのでUbuntuインストールしていきます #Ubuntu #ROS2 pic.twitter.com/vUWWoATjt6
メニューを開く
スマホが入るロボット「smabo」のリポジトリに ロボットアームのstlファイルと、ソースコードを追加しました github.com/akinami3/smabo #ROS #ROS2 #ラズパイ
メニューを開く
え!NUC動くかためにし起動してみたらUbuntu入ってた!www 行けるぞ〜🥹 とりあえずROS2を使えるバージョンのものを再インストールします! #Ubuntu #ROS2 pic.twitter.com/LEN4Wiu55w
メニューを開く
Ubuntuを入れるためのNUCを押し入れから発掘しました! celeronだと思ってたけどCore i3だった😆 動くか不明なので今から試します! #ubuntu #ROS2 pic.twitter.com/ZQsHMPcxK3
メニューを開く
箱庭デジタルツイン環境、とうとうバーチャル・ドローンとリアルロボットとの連携も可能になりました! #hakoniwa_toppers #hakoniwa_lab #ros2 pic.twitter.com/eUcbCSOiy5
メニューを開く
2DLiDAR(TG15)とTurtleBot3とUnityを箱庭ブリッジ(Zenoh&ROS)で接続して、デジタルツイン環境ができたので、リアルとバーチャル側を同時に動画撮影しました。この撮影環境作るのに1時間かかった。。 #hakoniwa_lab #hakoniwa_toppers #ros2 pic.twitter.com/z4qXjRoKN9
メニューを開く


ROS2 で iPhone のデプスカメラの割りとメインカメラを取得するパッケージを開発中です。 将来的にPointCloudを出したいのですがちょっとその方法がよくわからず苦戦しています。将来的にロボカップとかで使えればいいですね #ros2 #robocup pic.twitter.com/qaiUHRFtxI
メニューを開く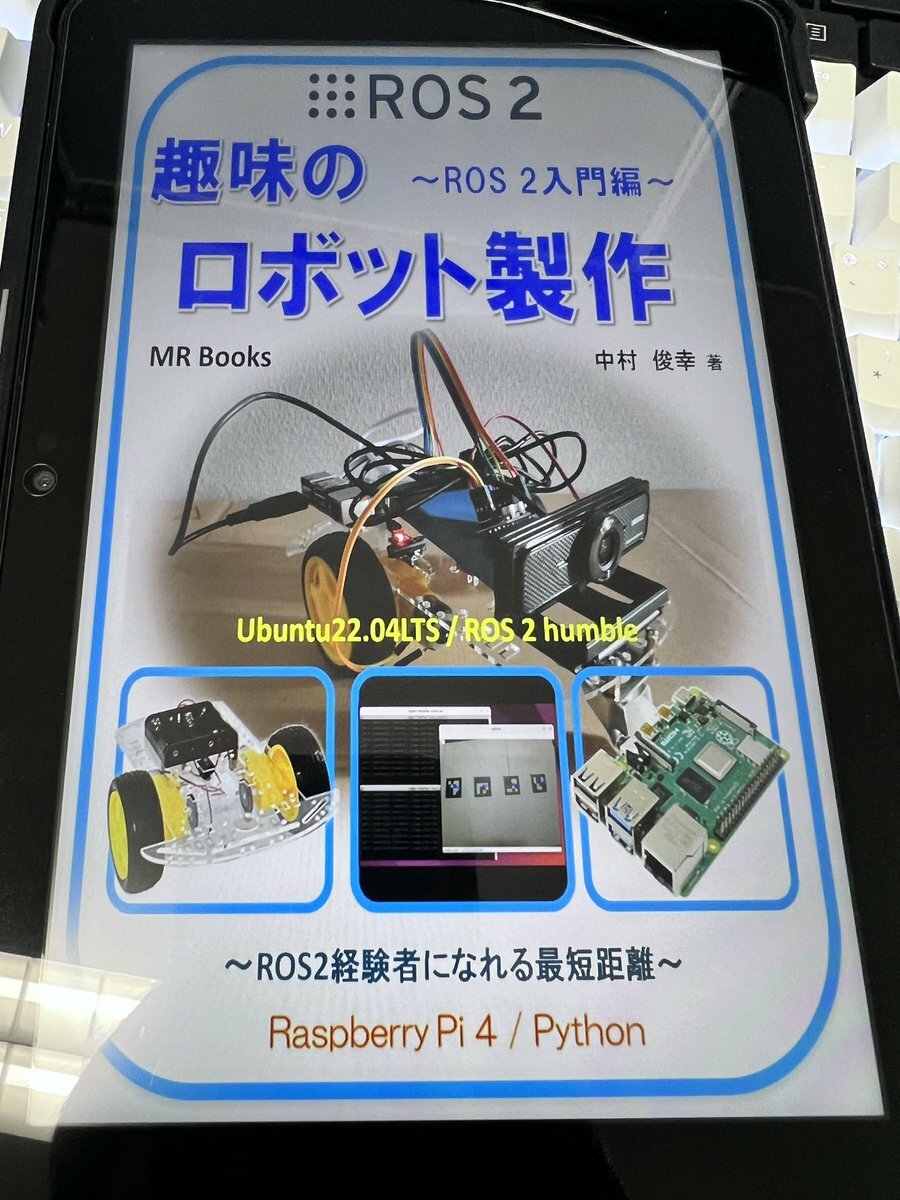
買おうと思ってた参考書が来月発売みたいだったので、まずは今買えるものをkindleで購入しました。 ROS2はまだビルドが終わったところで右も左もわからないので読んで勉強していきます😄 #raspberrypi #ROS2 pic.twitter.com/wnnRv4QCQi
メニューを開く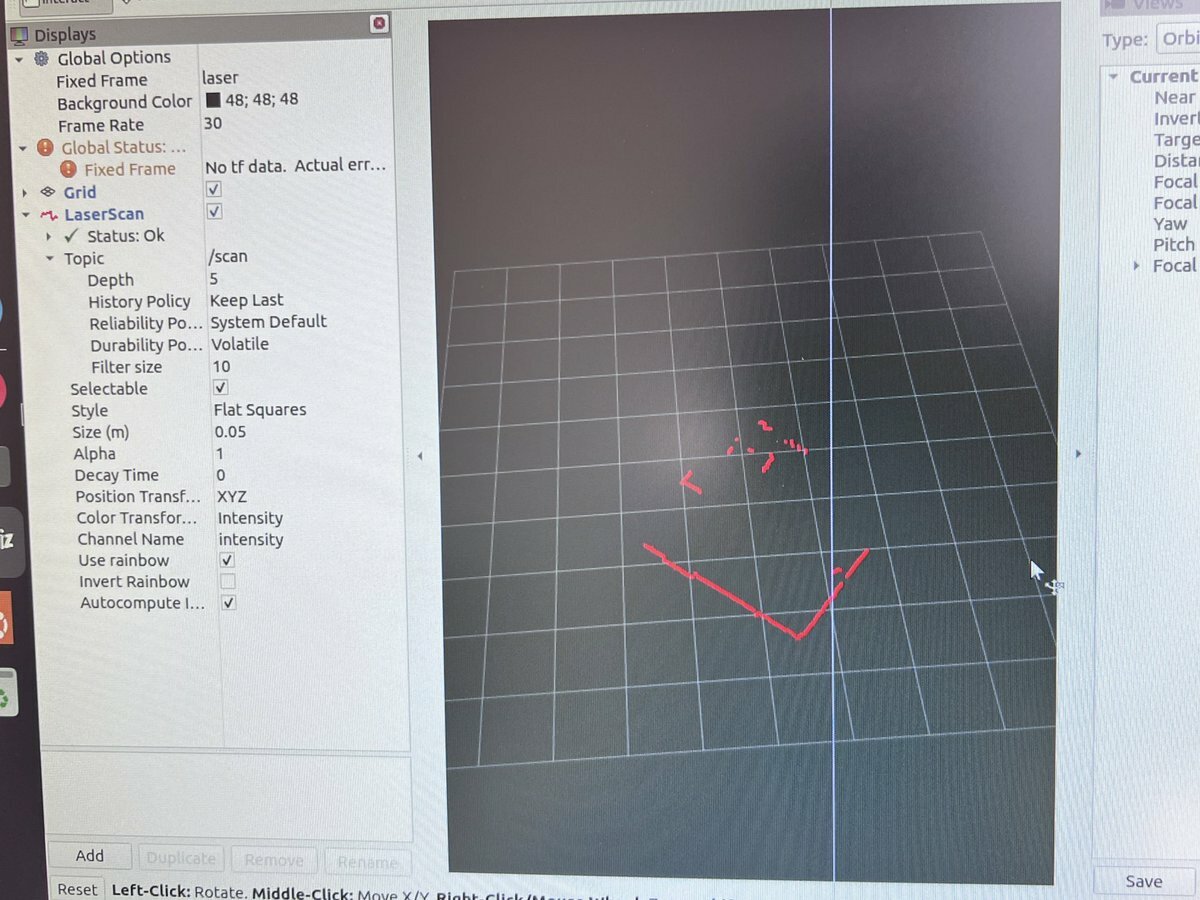

ついにA1M8 LiDARでスキャンした結果を表示できました。 ここからがSLAMスタートなのだけどめちゃくちゃ嬉しいです🥹 明日は早速Zeus Carに搭載するためのフレームの設計をします! #raspberrypi #ros2 #a1m8 #lidar pic.twitter.com/TSeYl9Kcab
メニューを開く
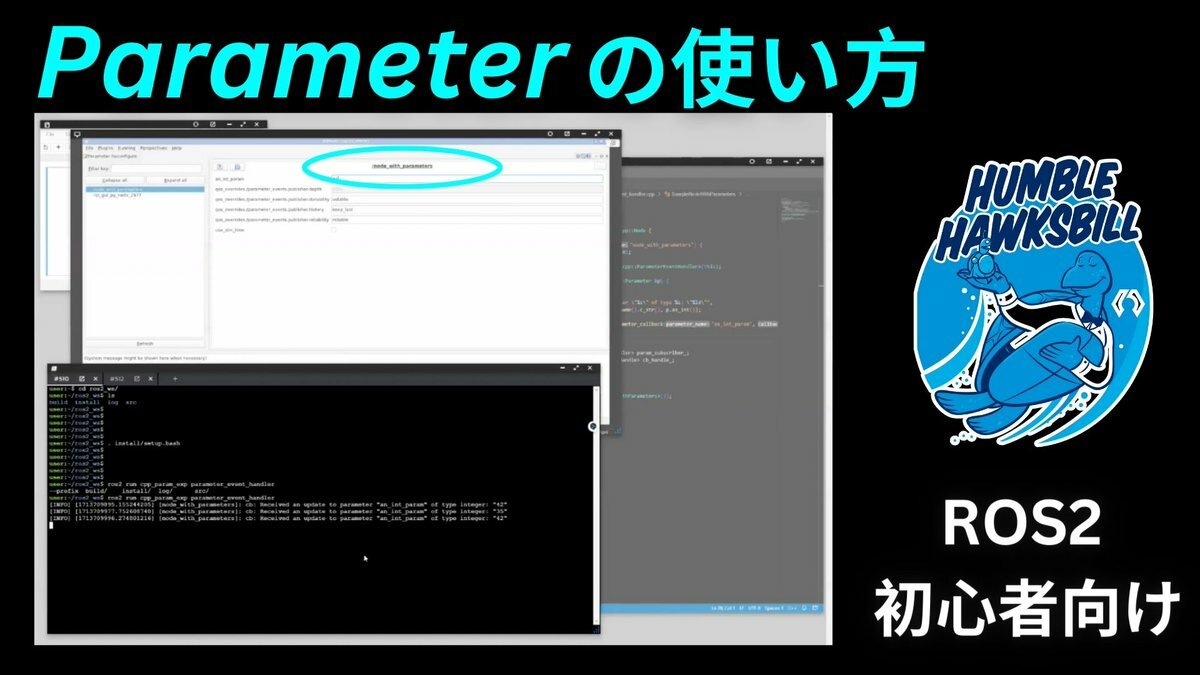
この包括的なチュートリアルで #ROS2 #Parameters を動的に書き換える方法を学びましょう: ow.ly/IjFo50RyJZJ 私たちの #Robotics #Ambassador である Takumi によるものです。 pic.twitter.com/G8MPdZptG2
メニューを開く
ラズパイとA1M8で地図作成、昨日は後一歩というところで終わってしまったので今日中には動かしたいです😄 #raspberrypi #ros2 #a1m8 #lidar pic.twitter.com/R5Oz8JLNIK
メニューを開く
KDL新事業創造係によるYouTubeチャンネル「KDL Robotics」ができました。第1弾の動画はTurtleBot3のセットアップを紹介するシリーズ🐢 今後もロボット工学に関する動画をアップ予定です。ぜひチャンネル登録をお願いします! youtu.be/JyiNeri-UM0?si… #robotics #turtlebot3 #ros #ros2 #ロボット
メニューを開く
kobukiのROSトピック /sensors/battery_state の仕様を調べたので追記しました。 kanpapa.com/today/2024/05/… #turtlebot #kobuki #ros2
メニューを開く
ようやく動き回れるようになりました。 TurtleBot2 kobukiがやってきた #8(バッテリー接続編) kanpapa.com/today/2024/05/… #turtlebot #kobuki #ros2
メニューを開く
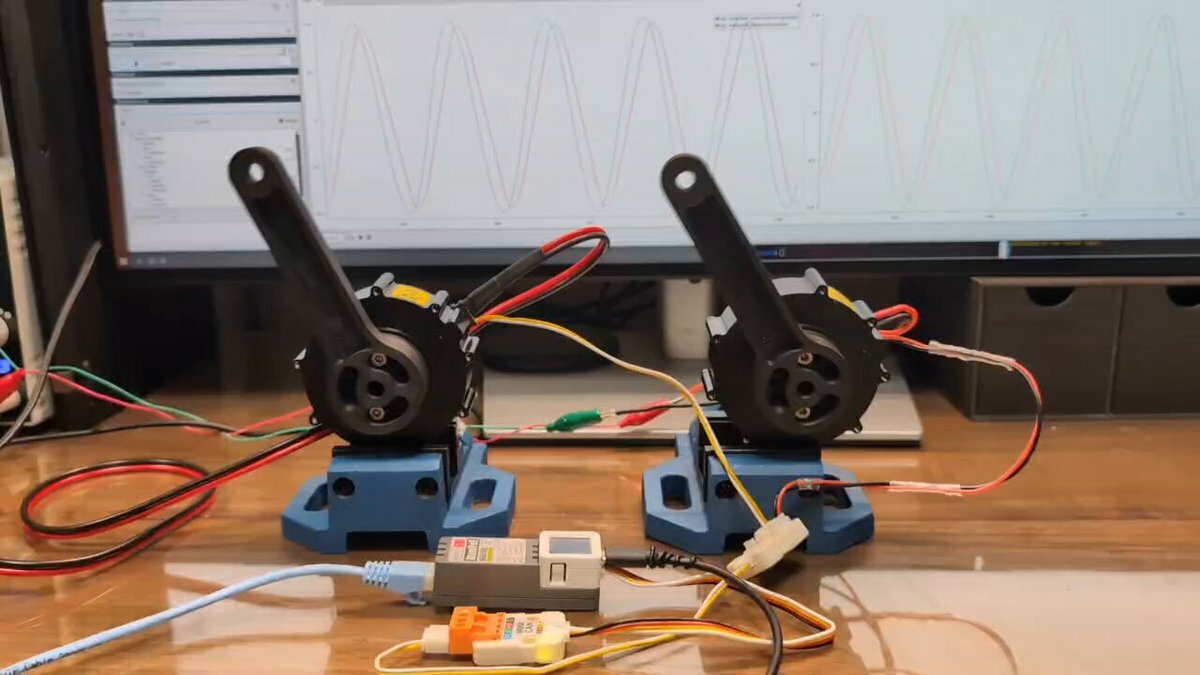
micro-ros + ROS2でCybergearを動かすためのパッケージをこちらに公開しました。Cybergearは最大トルクが高く、重大な自己に繋がる可能性がある製品ですので遊ぶ際はくれぐれもお気をつけください。 #M5Stack #cybergear #ros2 github.com/chikuta/cyberg…
この構成で動きました。今週中を目標にコード整備をして公開します。ATOMS3、ATOMIC W5500、ミニCANユニット構成でmicro-ros対応のCybergearコントローラを作れます。6,500円程度( S3LITE構成なら5,500円) でこれが作れるなら多軸のロボット制御に活用してもいいのでは?
メニューを開く
ComponentやDynamic Reconfigureについても追加で書いてみました。 ROS2習得の道はまだ遠い... #ros2 #rosjp github.com/DaikiMin/ros2_…
メニューを開く
久しぶりに勉強会でルンバを動かすことになったのでROS2 humble用にマニュアルを修正中。 github.com/kanpapa/Roomba… #roomba #ros2 #humble
メニューを開く
【告知】 この度、中西研からUnityとROS2を組み合わせたロボットプログラミングの技術書が出版されます! 発売は5/20を予定しており、以下のリンクからAmazonにて予約注文可能です! 主に修士課程の学生3名が開発/執筆に携わっています! ご興味のある方はぜひ! #ROS2 #Unity amazon.co.jp/dp/4910558292/
メニューを開く


新二年生(樋口研)の #卒研 活動がスタート!テーマは『ROS 2 で動かすロボット教材の製作』です。#python の講習が終わり、ノートPCへ #ubuntu や #ROS2 をインストールしました。 #turtlesim が実行できたので、次回は #ラズパイ へのインストールに進みます。#rosjp #機械工学科 #ロボット #robot pic.twitter.com/7Z5u3yrlcB
#AIロボット入門 第6章 #マニピュレーション です。#ROS2 #Ignition #Gazebo で #CRANE+V2 の #シミュレーション を実行しました。#関節 と #グリッパ の角度をキーボードの 0 から 9 で変更しています。グリッパの座標指定もできることを確認しました。 #ros #rosjp
メニューを開く
kobukiとOAK-D-LITE AIカメラを組み合わせた例をまとめました。 TurtleBot2 kobukiがやってきた #7(ROS2 物体追尾編) kanpapa.com/today/2024/05/… #turtlebot #kobuki #ros2 #oak_d_lite
メニューを開く
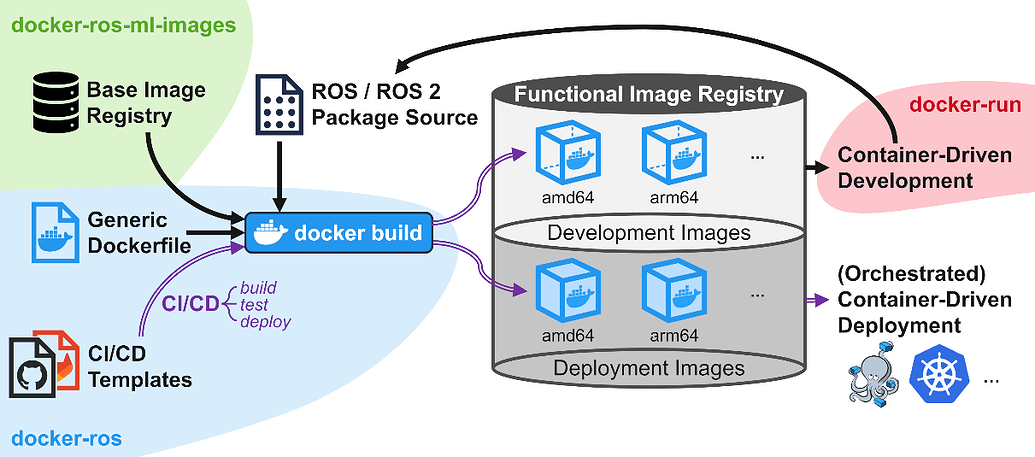
どんどん進むROSのコンテナ化、とのこと👀 discourse.ros.org/t/automated-co… #ros #ros2 #Docker #ros_discourse #rosjp pic.twitter.com/zXwrXFf5U9
メニューを開く
修論が終わったので、今更ながらROS2の勉強を始めました topic、service、actionをそれぞれC++とPythonで書いてみた #ros2 #rosjp github.com/DaikiMin/ros2_…
人気ポスト